")
Cuprins:
- Provizii
- Pasul 1: Setări imprimantă 3D
- Pasul 2: Construiește-ți propriul Otto DIY +
- Pasul 3: Codificați-vă propriul Otto
- Pasul 4: Codul principal pentru aplicația Bluetooth
- Pasul 5: Copiați, extindeți, personalizați, modificați, remixați și partajați
- Pasul 6: Configurare Bluetooth (BT) (numai dacă asocierea nu reușește):
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 11:41.
- Modificat ultima dată 2025-01-23 15:04.




Natura cu adevărat open source a lui Otto permite educația deschisă STEAM, colectăm feedback de la diferite ateliere și școli din întreaga lume care folosesc deja bricolajul Otto în clasa lor și în funcție de deschiderea acestor locuri educaționale, organizăm materialul lecției și îl împărtășim.
Licența CC-BY-SA Creative Commons înseamnă că puteți copia gratuit, dar trebuie să acordați credite originalului punând site-ul nostru (https://www.ottodiy.com/)
Otto DIY + este versiunea îmbunătățită și avansată a originalului #OttoDIY, ideea este de a avea aceleași caracteristici de bază robot DIY + control și programare Bluetooth + servomotoare cu transmisie metalică + reîncărcabile + schimbarea modurilor prin senzor tactil + senzor de sunet + mișcări de lumină + alte rezultate + …?
Partea interesantă este că facem o dezvoltare deschisă cu factorii de decizie și hackerii din întreaga lume, așa că suntem deschiși la idei, nu numai de la experți cu care ne puteți alătura, feedback, partajare socială, testare sau orice altă contribuție la care v-ați putea gândi.
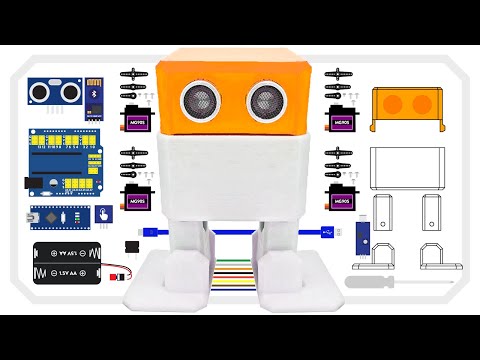
Provizii
1 × Arduino Nano
1 × modul Bluetooth HC-06 sau HC-05
1 × Arduino Nano Shield I / O; ai putea folosi o mini placă de măsurare, dar mult mai mult lucru prin cablu
1 × cablu USB-A la Mini-USB
4 × Micro servo MG90s (metal)
1 × Buzzer
10 × fire jumper feminin / feminin
1 × senzor tactil
1 × senzor de sunet
1 × 8x8mm Micro Switch Auto blocare On / Off
1 × 3,7 V baterie LiPo cu rapel la 5V (opțional) 1 × șurubelniță Phillips 1 x imprimantă 3D (sau utilizați un serviciu sau un prieten;))
Pasul 1: Setări imprimantă 3D

Este important să citiți primul Otto DIY anterior instructabil pentru a vă familiariza cu elementele de bază ale construirii unui robot biped Obțineți toate piesele STL de imprimare 3D, coduri și biblioteci pentru Bluetooth, accesând aici https://wikifactory.com/+OttoDIY/otto-diy- plus în fila fișiere
- Recomandați utilizarea unei imprimante 3D FDM cu material PLA.
- Nu este nevoie deloc de suporturi sau plute.
- Rezoluție: 0,15 mm
- Densitate de umplere 20%
Trebuie să ajustați dimensiunea, unele modificări utilizează fișierul sursă realizat în Autodesk Fusion 360
Sau Tinkercad aici
Pasul 2: Construiește-ți propriul Otto DIY +



în următorul videoclip și imagini puteți avea o referință despre cum să construiți Otto DIY +, datorită unor noi versiuni ale designului robotului.
Pasul 3: Codificați-vă propriul Otto





Deci, până în acest moment ar trebui să aveți un Otto 3D tipărit, asamblat, acum câteva programe pentru a avea biblioteci și Arduino instalate în computer.
Cel mai ușor să vă codificați propriul Otto este prin utilizarea software-ului nostru Blockly, un coder mai avansat poate încerca direct Arduino IDE.
Pasul 4: Codul principal pentru aplicația Bluetooth




Otto trebuie să fie gata să primească comanda prin Bluetooth și pentru asta trebuie să introducă codul principal în creier
- Copiați bibliotecile Otto în folderul Arduino IDE
- Încărcați schița APP.ino pe Otto
-
Descărcați și instalați aplicația în smartphone. Magazin Google Play (https://play.google.com/store/apps/details?id=com.ottodiy)
- Acum puteți conecta modulul și activați Bluetooth în telefon.
- Găsiți Otto și asociați adresa / numele Bluetooth
- Acum puteți utiliza APP pentru a controla Otto!
- Jucați-vă cu noile funcții și, dacă nu, este posibil să trebuiască să vă reconfigurați BT-ul, dar nu vă faceți griji este ușor;)
Pasul 5: Copiați, extindeți, personalizați, modificați, remixați și partajați




Consultați această postare de blog pentru a găsi idei despre cum să vă personalizați propriul robot
Alătură-te comunității Otto Builder! Urmărește-ne, dă-ne un like și împărtășește creativitatea ta, ai putea fi prezentat aici prin partajarea robotului tău în orice social media
Facebook și Instagram
folosiți hashtagul #ottodiy în postarea și eticheta dvs. sau menționați @OttoDIY
Faceți parte din această comunitate prietenoasă de constructori, profesori și producători de roboți! alăturându-ne aici Bine ați venit în comunitatea noastră Otto Builder!
Pasul 6: Configurare Bluetooth (BT) (numai dacă asocierea nu reușește):
Această configurare este necesară DOAR pentru modulele care nu vin cu rata de transmisie standard de 9600, cum să știți? pur și simplu încercați mai întâi codul și aplicația, dacă telefonul nu se împerechează cu Otto sau răspunde la comenzi, atunci probabil că înseamnă că modulul dvs. are o rată de transmisie diferită, așa că trebuie configurat
Codul BT are 115200 baud-rate, astfel încât modulul BT trebuie să corespundă acelei viteze pentru a putea comunica cu Arduino Nano prin interfața serială (UART).
Pentru HC-05: 38400 sau 115200
1. Încărcați schița HC05_BT_config.ino mai întâi pe Nano, apoi deconectați Nano de la USB.
2. Acum conectați BT la Arduino Nano așa cum se arată în diagramă, dar nu conectați VCC.
TX - RX
RX - TX
VCC - 5V
GND - GND
3. Conectați USB-ul la Nano și apoi conectați VCC, astfel încât BT să intre în modul AT. LED-ul de pe BT ar trebui să înceapă să clipească mai lent, aproximativ o dată la 2 secunde. (Dacă acest lucru nu funcționează, încercați să țineți apăsat butonul de pe modulul BT în timp ce conectați VCC).
Deschideți monitorul serial în IDE, setați baud-rate la 9600 și terminarea liniei la ambele NL și CR.
Tastați AT, apoi apăsați Enter; (dacă totul este în regulă, BT ar trebui să răspundă cu OK și apoi să introducă următoarele comenzi:
AT + NAME = Zowi „setarea numelui”
AT + PSWD = 1234 „parolă de asociere”
AT + UART = 115200, 1, 0 "rata de transmisie"
AT + POLAR = 1, 0 "permițând folosirea pinului STATE ca resetare pentru programarea arduino peste BT"
Acum mergeți la pasul APP
Dacă aveți vreo problemă, verificați această instrucțiune despre cum să modificați valorile implicite ale modulului Bluetooth HC-05 utilizând comenzile AT
www.instructables.com/id/Modify-The-HC-05-…
Pentru HC-06: 9600 sau 115200
Pentru modulul HC-06 BT lucrurile sunt puțin mai simple, deoarece modulul este întotdeauna în modul de comandă AT atunci când nu este conectat la nimic. Dezavantajul este că modulul HC-06 nu poate fi folosit pentru a încărca schițe pe Arduino deoarece nu are resetare. Pentru configurarea modulului
1. încărcați această schiță HC06_BT_config.ino pe Nano
1. deconectați USB
2. conectați modulul BT la Arduino Nano astfel:
TX - RX
RX - TX
VCC - 5V
GND - GND
3. Porniți Nano-ul și după aproximativ 10-15 secunde totul ar trebui să fie terminat și BT-ul dvs. ar trebui să fie configurat (LED13 ar trebui să înceapă să clipească).
Dacă aveți probleme, verificați acest https://www.instructables.com/id/Tutorial-Using-HC… instructabil
DACĂ ESTE ORICE ÎNTREBARE, nu primesc notificări prin comentarii noi instructabile, deci, dacă e ceva, vă rugăm să postați în comunitatea noastră
Recomandat:
Robot cvadruped cu alimentare Arduino imprimat 3D: 13 pași (cu imagini)
")
Robot cvadruped motorizat Arduino imprimat 3D: din instructabilele anterioare, puteți vedea probabil că am un profund interes pentru proiectele robotice. După instruirea anterioară, unde am construit un robot biped, am decis să încerc să fac un robot patruped care să poată imita animale precum câinele
GorillaBot, robotul quadruped Sprint autonom Arduino imprimat 3D: 9 pași (cu imagini)
")
GorillaBot Robotul Quadruped Sprint Autonom Arduino Imprimat 3D: În fiecare an la Toulouse (Franța) are loc Toulouse Robot Race # TRR2021 Cursa constă dintr-un sprint autonom de 10 metri pentru roboții biped și patruped. Recordul actual pe care îl adun pentru patrupedi este de 42 de secunde pentru un Sprint de 10 metri. Deci, cu asta în m
Tito - Robot imprimat 3D Arduino UNO: 7 pași (cu imagini)
")
Tito - Arduino UNO 3D Printed Robot: Tito este un robot DIY de dans biped, derivat de la Zowi și Bob, practic a fost adaptat la o placă standard Arduino UNO cu conexiuni și suporturi mai ușoare. A fost prima iterație pentru Otto DIY (www.ottodiy.com)
OAREE - Imprimat 3D - Robot de evitare a obstacolelor pentru educația inginerească (OAREE) cu Arduino: 5 pași (cu imagini)
 cu Arduino: 5 pași (cu imagini)")
OAREE - Imprimat 3D - Robot de evitare a obstacolelor pentru educația inginerească (OAREE) cu Arduino: OAREE (Obstacle Avoiding Robot for Engineering Education) Imprimabil 3D, ușor de asamblat, folosește servouri de rotație continuă pentru movem
Oală automată inteligentă pentru plante - (DIY, imprimat 3D, Arduino, auto-udare, proiect): 23 de pași (cu imagini)
: 23 de pași (cu imagini)")
Oală automată inteligentă pentru plante - (DIY, 3D Printed, Arduino, Self Watering, Project): Bună, uneori, când plecăm de acasă câteva zile sau suntem cu adevărat ocupați, plantele casei (nedrept) suferă pentru că nu sunt udate când sunt nevoie de el. Aceasta este soluția mea. Este un ghiveci inteligent care include: un rezervor de apă încorporat. A senso